Video of the robot operating: dummy_move.MP4
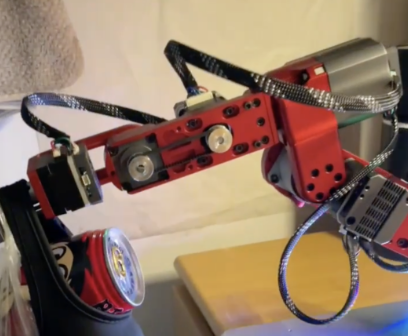
A desktop 6-dof robotic arm
Goal: build a powerful, precise and compact robotic arm for fun
- Compact: Fits on a standard desk without clutter
- Smooth: High-precision, fluid motion for real-world tasks
- Powerful: Supports payloads up to 2 kg
- Aesthetic: Designed to look fire — not just function

Firmware/Control Software Modules
- Dummy Control System
- Stepper Motor Control System
- 6-DOF Robot Kinematics
- Motion Control System
- Motor Driver and FOC
- Encoder Calibration System
Mechanical Design
Body/Joints
- 3 prototypes, 144 iterations, FEA-verified
- 2 kg payload capacity (end-effector)
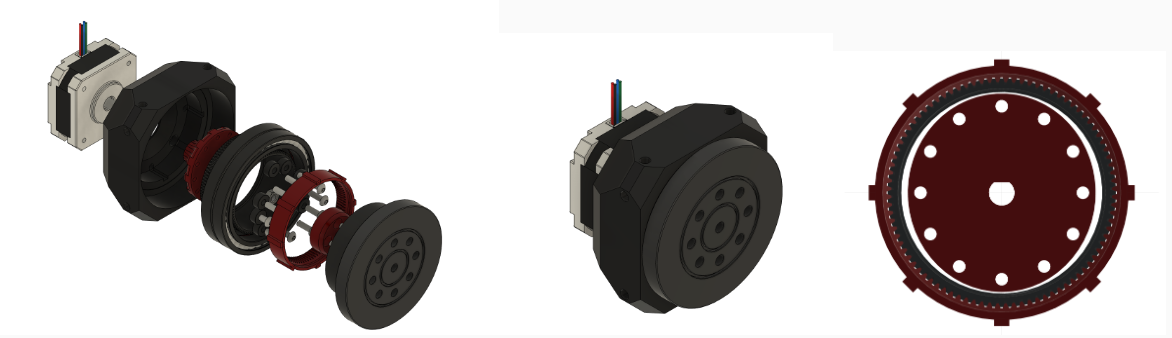
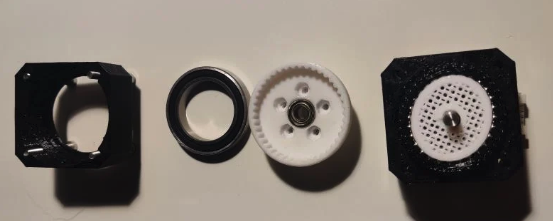
Actuator Design
- Initial attempt: custom 3D-printed harmonic drives (1:50, 1:20 ratios)
- Final version: commercial harmonic drives for precision and durability
Arm Geometry
- 6-DOF model for full human-arm mimicry
Firmware Capabilities
| Module | Highlights |
|---|---|
| Command System | Command parsing, emergency stop, state machine |
| Calibration | Auto homing, encoder rectification, flash persistence |
| Motor Control | FOC sine vector control with lookup tables |
| Tuning Interface | Real-time PID tuning and sinusoidal joint testing |
| Safety Features | Joint limits, overcurrent/overheat protection, stall detection |
| Motion Modes | Sequential point-to-point, continuous trajectory, interruptible |
Technical Capabilities
| Feature | Description |
|---|---|
| Full FK/IK Solver | Real-time Cartesian/joint conversion with multiple solution handling |
| FOC Driver with Sine LUT | High-efficiency driver with fixed-point sine wave modulation |
| Encoder Auto-Calibration | Automated calibration using SPI 14-bit encoders with cycle-aware correction |
| CAN Command Bus | Modular, low-latency control of multi-joint system |
| Step Motor Abstraction | Unified class for position, velocity, and current mode control |
| Safety-First Design | Stall protection, thermal monitoring, emergency stop system |