Tracking the progress of UW RoboSoccer
We are competing in the 2026 RoboCup in South Korea.
- Building 4 ~50cm tall humanoid robots to play soccer
- Attempting to do so with abstraction, and cheap and accessible hardware
- Most other robots competing are ~$10k each
- Example of robots playing: https://www.youtube.com/watch?v=Vxxrlv6Ohew
- We are trying to revolutionize the competition by introducing full Reinforcement Learning control, from bipedal movements to game theory
- We are also looking for funding! Please reach out!
Progress
December 2024
This month the goal is to prepare to develop a working prototype in the new year
- prep BOM
- Redesign
- focusing on DFM, and light weight
- CoM, biomechanics research
Dec 12th:
Prototype BOM:
| Part | Specifications | Why Include | Suggested Links |
|---|---|---|---|
| Actuator/Servo | - Serial Bus Control - 12V compatible - 30KG torque - Price range $0-50 | - Provides precise movement control - Serial bus allows for complex motion sequences - High torque for stability | HiWonder HTD-45H ST3215 Servo |
| Controller | RPi or alternative | - Central processing unit - Can handle multiple I/O - Good community support | Consider: Raspberry Pi or similar SBC |
| Servo Driver Board | Waveshare Bus Servo Adapter | - Necessary interface between controller and servo - Handles voltage/signal conversion | Waveshare Bus Servo Adapter |
| Battery | - 12V - 1200mAh | - Powers entire system - Rechargeable - Sufficient capacity for extended use | KBT 1200mAh |
| Camera + IMU | Waveshare RP2040 LCD 1.28” | - Combined vision and motion sensing - Integrated display for feedback - Compact form factor | Waveshare RP2040 LCD |
| Voltage Converter | 12V to 5V 3A | - Necessary for powering 5V components - High current capacity for reliability | TBD |
| Audio System | - Microphone - Speaker - Amplifier | - Enables audio interaction - Feedback system - User communication | TBD |
| Connectors | Molex style | - Reliable connections - Easy maintenance - Industry standard | TBD |
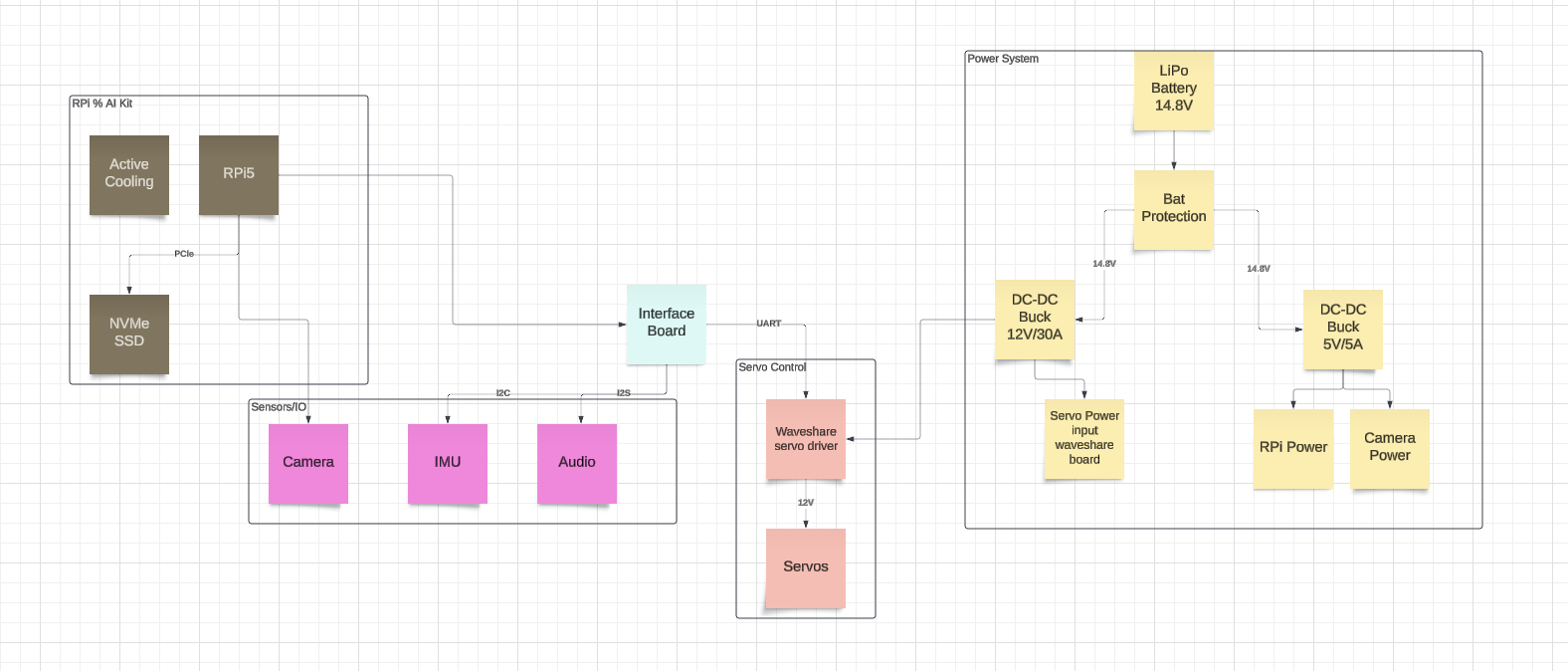
Hardware Architecture
made with Lucid
November 2024
-
Initial Mechanical design completed:
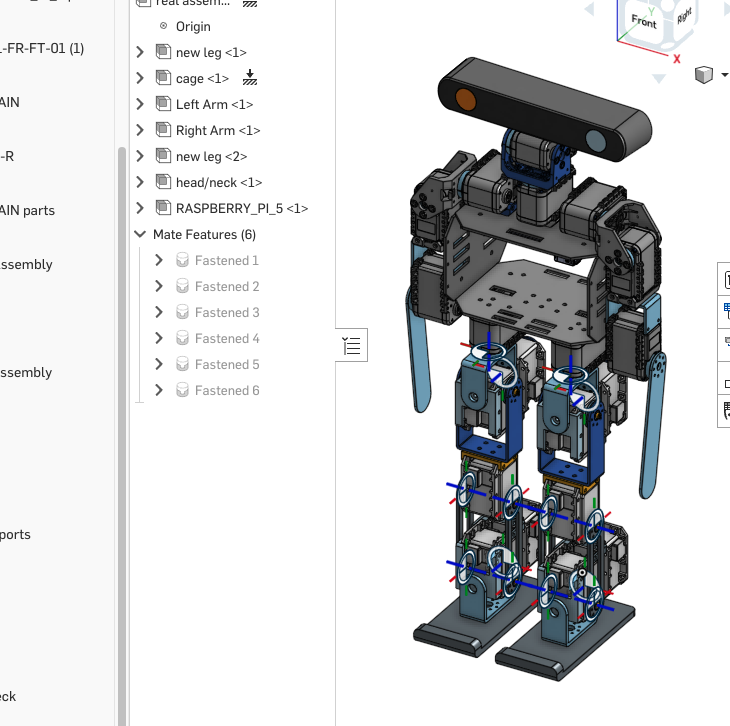
-
Currently research URDF and XML to be used in Mujoco Simulation
We are also rebuilding dm_control with more specialized control environment for our RL training scenarios: https://github.com/UW-RoboSoccer/soccer_env