https://www.tandfonline.com/doi/epdf/10.1080/01691864.2020.1813624?needAccess=true legs of humanoid robot are designed to
- recudece model error
- reduce leg inertia
for 1.: each link must have high stiffness against bending nad torsion, and 2.: end link is designed to have a low mass
brought up an interesting point: high CoM in bipedal robots is benefitial
- simplifies dynamics: when robot is standing on one leg, the bipedal robot’s dunamics can be modeled as a inverted pendulum. nad mass of robot can be considered as concentrated at the CoM
- reduced lateral motion:
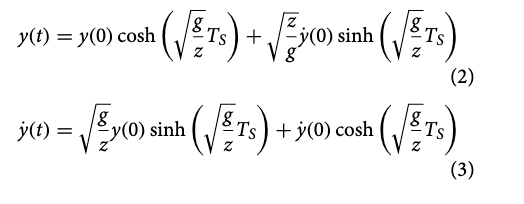 According to these equations, when CoM (z) is higher, robot requires less lateral swing of the CoM for given a single support period.
According to these equations, when CoM (z) is higher, robot requires less lateral swing of the CoM for given a single support period. - angular momentum reduction: high CoM position helps reduce angular momentum about the fore-aft axis, esp when wallking fast. because excessive anglar momentum make robot less stable and less efficient
- higher CoM can contribute to recuced angular momentum, allows for more efficient movement patterns
walking cycle control:
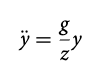
- single support phase:

- y is posiition, Ts is time on one foot, z is CoM height, g is grav
- Weight transfer
- before lifting foot, the robot shifts its COM towards supporting foot
- must be a precise shift
- controlled by monitoring ZMP — point where robot’s weight and intertial forces are balanced
- Real-time sensors measure the robot’s actual position and forces
- compres theres measurements to ideal math model
- adjusts using hips and nakle actuators to maintain correct sway
- if sway gets too large, robot can take wider steps
- foot placement
- robot plans where to place each foot based on desired sway pattern
- wider steps create more stability but more energy and larger sway
- narrower steps = more energy efficeinet but need more control precision